
Gradient descent vs Newton Raphson
Published:
Gradient descent vs Newton Raphson
This compares these two popular methods for solving non-linear equations.
We have a function . For gradient-descent, we cast the problem as the minimisation of the cost function ). But because we are cheap we know that is the same as minimising \(J(x)=\frac{1}{2}F(x)^2\) Its gradient is thus \(\nabla J(x)=F(x)\nabla F(x)\)
import numpy as np
import matplotlib.pyplot as plt
import seaborn; seaborn.set()
h=1e-6
nit=10
def gradient(func,x):
#f(x+h)-f(x-h) /2h
#return (func(x+h)-func(x-h))/(2*h)
return 2.0*x
def func(x):
return np.square(x)
def gradient_descent(func,x,alpha):
x_full=[x]
#Minimise distance to zero
for i in range(nit):
x-=alpha*func(x)*gradient(func,x)
x_full.append(x)
return x,x_full
def newton_raphson(func,x,a):
x_full=[x]
for i in range(nit):
x-=a*func(x)/gradient(func,x)
x_full.append(x)
return x,x_full
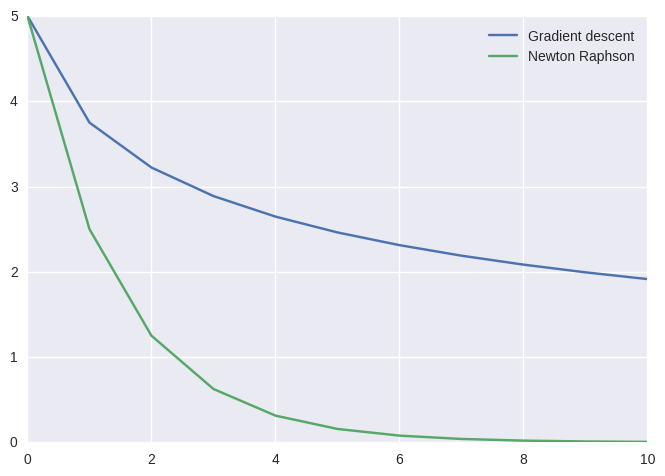
x,x_full=gradient_descent(func,5,0.005)
x2,x2_full=newton_raphson(func,5,1)
print("Final solution and cost of Gradient descent:: %f" %x)
print("Final solution and cost of Newton-Raphson: %f"%x2)
#x_full=np.array(x_full)
its=np.arange(nit+1)
plt.plot(its,x_full)
plt.plot(its,x2_full)
plt.legend(('Gradient descent','Newton Raphson'))
plt.show()
Final solution and cost of Gradient descent:: 1.914218
Final solution and cost of Newton-Raphson: 0.004883
But let’s try now a different learning rate
x,x_full=gradient_descent(func,5,0.02)
x2,x2_full=newton_raphson(func,5,1.)
print("Final solution and cost of Gradient descent:: %f" %x)
print("Final solution and cost of Newton-Raphson: %f"%x2)
x3,x3_full=gradient_descent(func,5,0.04)
x4,x4_full=newton_raphson(func,5,1.99)
its=np.arange(nit+1)
plt.plot(its,x_full)
plt.plot(its,x2_full)
plt.plot(its,x3_full)
plt.plot(its,x4_full)
plt.legend(('Gradient descent (alpha=0.02)',
'Newton Raphson (alpha=1)',
'Gradient descent (alpha=0.03)',
'Newton Raphson (alpha=1.99)'))
plt.show()
Final solution and cost of Gradient descent:: 0.000000
Final solution and cost of Newton-Raphson: 0.004883
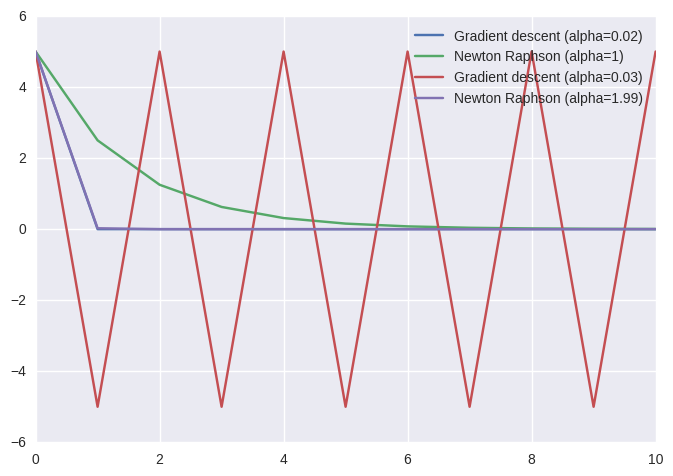
The performance of the algorithms seems to depends strongly on their learning rate. Very high values cause oscillations and instabilities. Low values cause slow convergence. Let’s now try 2D. $F(x,y)=x^2+y^2-4$. This is still a scalar function.
h=1e-6
nitmax=400
start=np.array([4,-5],dtype='float128')
x_full_sys=np.array(start)
def gradient(x_loc,limit=False):
#f(x+h)-f(x-h) /2h
#return (func(x+h)-func(x-h))/(2*h)
grad=np.array(2.0*x_loc,dtype='float128')
if limit==False:
return grad
else:
larger=np.abs(grad)>1
grad[larger]=np.sign(grad[larger])*1
smaller=np.abs(grad)<0.01
grad[smaller]=np.sign(grad[smaller])*0.01
return grad
def func(x):
if x.ndim==1:
return np.square(x,dtype='float128').sum()-4
else:
return np.square(x,dtype='float128').sum(axis=1)-4
def cost(x):
return np.square(func(x),dtype='float128'),np.dot(func(x),gradient(x))
def acc(xp):
global x_full_sys
x_full_sys=np.vstack((x_full_sys,xp))
return 0
def norm(x):
return np.sqrt(x.dot(x))
def gradient_descent(func,start,alpha,tol):
x_full=np.array(start)
x=np.array(start)
#Minimise distance to zero
i=0
while cost(x)[0]>tol and i<nitmax:
x-=alpha*np.dot(func(x),gradient(x,limit=True))
x_full=np.vstack((x_full,x))
i+=1
return x,x_full,i
def minv(array):
if array.ndim==1:
return 1/array
else:
return np.linalg.inv(array)
def newton_raphson(func,start,gamma,tol):
x_full=np.array(start)
x=np.array(start)
i=0
while cost(x)[0]>tol and i<nitmax:
x-=gamma*np.dot(func(x),minv(gradient(x,limit=True)))
x_full=np.vstack((x_full,x))
i+=1
return x,x_full,i
import scipy.optimize
x_full_sys=np.array(start)
a=scipy.optimize.minimize(cost,start,callback=acc,tol=1e-6,jac=1)
nit_a=a.nit
x_sys=a.x
a
fun: 2.180295075193263e-15
hess_inv: array([[ 0.6341257, 0.45734287],
[ 0.45734287, 0.42832141]], dtype=float128)
jac: array([ 1.1667712e-07, -1.458464e-07], dtype=float128)
message: 'Optimization terminated successfully.'
nfev: 11
nit: 10
njev: 11
status: 0
success: True
x: array([ 1.2493901, -1.5617376], dtype=float128)
x,x_full,nit_1=gradient_descent(func,start,0.05,1e-6)
x2,x2_full,nit_2=newton_raphson(func,start,0.1,1e-6)
its_1=np.arange(nit_1+1)
its_2=np.arange(nit_2+1)
its_sys=np.arange(nit_a+1)
plt.plot(its_1,cost(x_full)[0])
plt.plot(its_2,cost(x2_full)[0])
plt.plot(its_sys,cost(x_full_sys)[0])
plt.legend(('Gradient descent','Newton Raphson','System'))
plt.show()
print("Final cost, solution, and iterations of Newton-Raphson: %f" %cost(x2)[0],x2,nit_2)
print("Final cost, solution, and iterations of Gradient descent: %f"%cost(x)[0],x,nit_1)
print("Final cost, solution, and iterations of Minimize: %f"%cost(x_sys)[0],x_sys,nit_a)
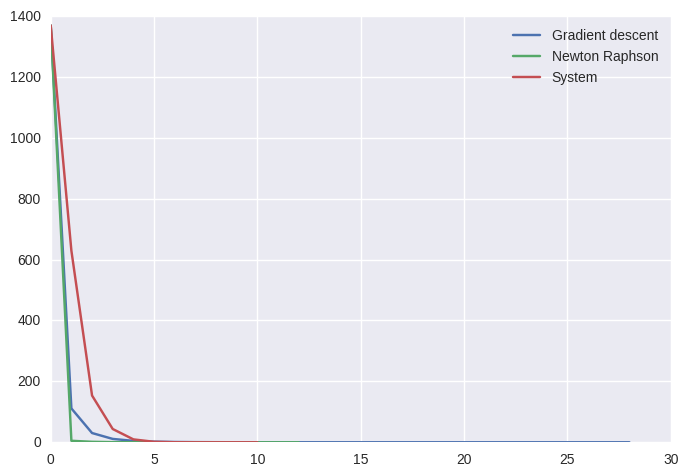
Final cost, solution, and iterations of Newton-Raphson: 0.000001 [ 0.92239283 -1.7743928] 12
Final cost, solution, and iterations of Gradient descent: 0.000001 [ 0.82306432 -1.8230643] 28
Final cost, solution, and iterations of Minimize: 0.000000 [ 1.2493901 -1.5617376] 10
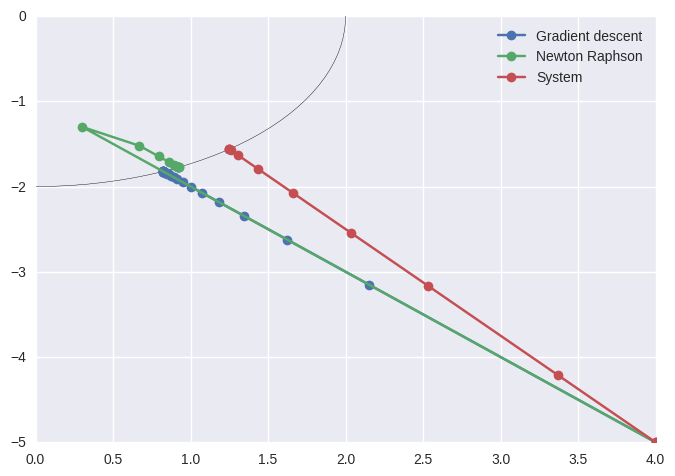
plt.plot(x_full[:,0],x_full[:,1],marker='o')
plt.plot(x2_full[:,0],x2_full[:,1],marker='o')
plt.plot(x_full_sys[:,0],x_full_sys[:,1],marker='o')
plt.plot(start[0],start[1], marker='x',linestyle='None')
plt.plot(0,0, marker='x',linestyle='None')
circle=plt.Circle(((0,0)), radius=2,fill=False)
plt.gca().add_patch(circle)
plt.legend(('Gradient descent','Newton Raphson','System'),loc=0)
plt.show()
%timeit x,x_full,nit_1=gradient_descent(func,start,0.05,1e-6)
%timeit x2,x2_full,nit_2=newton_raphson(func,start,0.1,1e-6)
100 loops, best of 3: 4.88 ms per loop
100 loops, best of 3: 2.18 ms per loop
%timeit a=scipy.optimize.minimize(cost,start,callback=acc,tol=1e-6,jac=1)
100 loops, best of 3: 3.91 ms per loop
Seemingly, then, as much as I like NR, the pre-made solvers behave much better.
The pre-made solver, furthermore, does not require special finetuning of parameters. Plot twist: going by the time it takes, newton-raphson seems to be actually faster… because we have finetuned its parameter to make it really fast
So if one knows a priori about the problem, one can finetune custom solvers to go quite fast. Premade algorithms will be more stable, no matter what the starting conditions. On average, they will win.